| Material: |
Q345D(can Be Customized) |
Robot Size: |
2750*1300*1150mm |
| ROV: |
Underwater Dredging ROV |
|
|
Underwater Dredging ROV VVL-QY270-130A
Robot:

Cable and winding roll:

Control cabinet and console:

>Introduction:
The underwater dredging robot is designed with a small fuselage. The diving depth can reach 50m, and it is equipped with waterproof cable. The robot advances forward, concentrates on the suction port through the sludge recovery device, sucks the sludge by the suction pump, discharges the sludge by the sewage pump, and travels in the sludge pipeline, which has large pulling force and durability. It is equipped with a high-definition turbid water network camera to observe the inner wall of the pipeline in an all-round way.
>Application
Dam dredging, circulating pool dredging, urban underground canal dredging, large pipeline dredging, urban river dredging, culvert dredging and other dredging environments.
>Technical Advantage
* The fuselage adopts Q345D, which can adapt to harsh field working environment.
* The machine auger has good impact resistance and adopts single-connected hydraulic advanced integration module to ensure the power of starting, stopping and rotating of the auger.
* High wear-resistant rubber track;
Configuration is below:
| Robot part |
|
| Size&weight |
2750*1300*1150mm (with churn-dasher) 1950*1300*1150mm (without churn-dasher) 2100kg; |
| Material |
stainless steel material, corrosion resistance, seawater and fresh water can be used |
| The power system |
Driven by hydraulic pressure |
| Observation system |
It uses a high-definition turbid water network camera with a minimum illumination of 0.001 Lux, super night vision and automatic day-night switching. |
| Light |
Front 3*50W LED light; Rear 1*50W LED light; |
| The cable control system |
Outer diameter of 22 mm ,a total length of 100 m. It is covered with two layers of load-bearing steel wire pin armor and rubber protective layer. The maximum load-bearing capacity is 1000 kg |
| Depth&speed |
Submergence depth 15m, travel speed 5-26 m/min; |
| Sensor |
Depth sensor, temperature sensor, three-dimensional electronic compass; |
| Track |
High wear-resistant rubber track, 255mm width, 4015mm length. |
| Main control part |
|
| Main control system |
Independently developed, display parameters including machine orientation, hydraulic system parameters, electrical warehouse temperature, video recording and superposition, photography; |
| Power-supply system |
200kW electric control cabinet and substation system are used to supply power to robot and sludge treatment units, as well as safety protection function. |
| Winch |
Integration of electrical cabinet and take-up device, which is safe and convenient in construction. |
| Advantages |
Full hydraulic drive winch system, strong impact resistance, 1700mm length can complete underwater work well. |
Working picture:



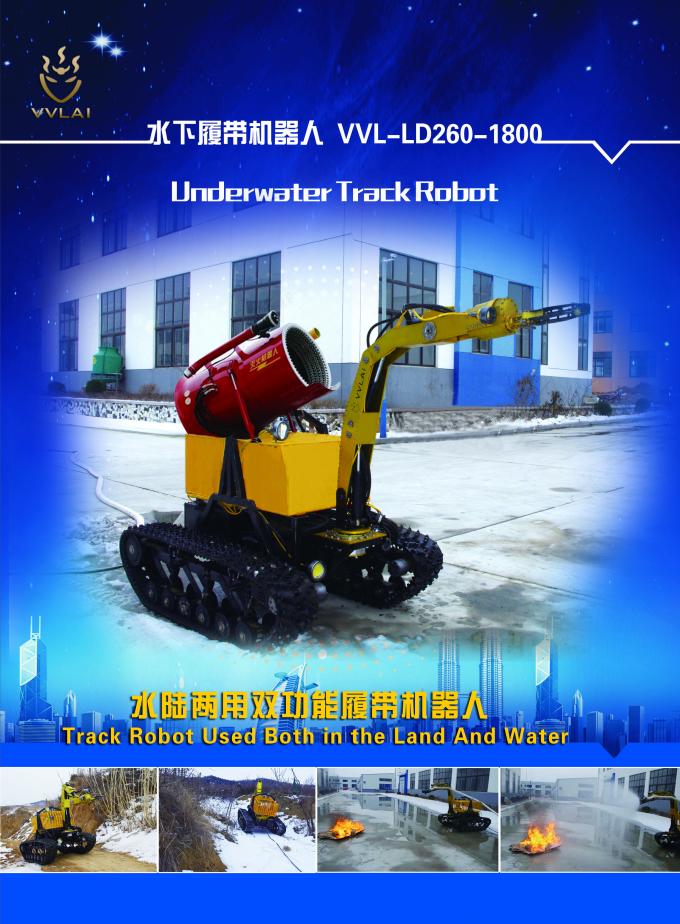
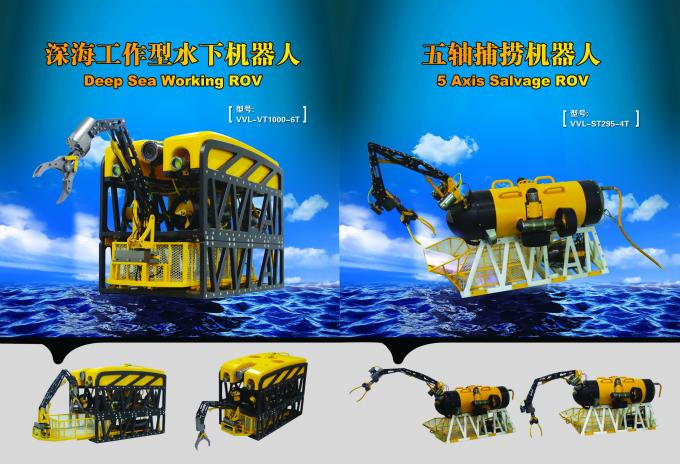
Double-5 Axis Hydraulic Manipulator Dredging ROV
VVL-LD260-1800

Introduction:
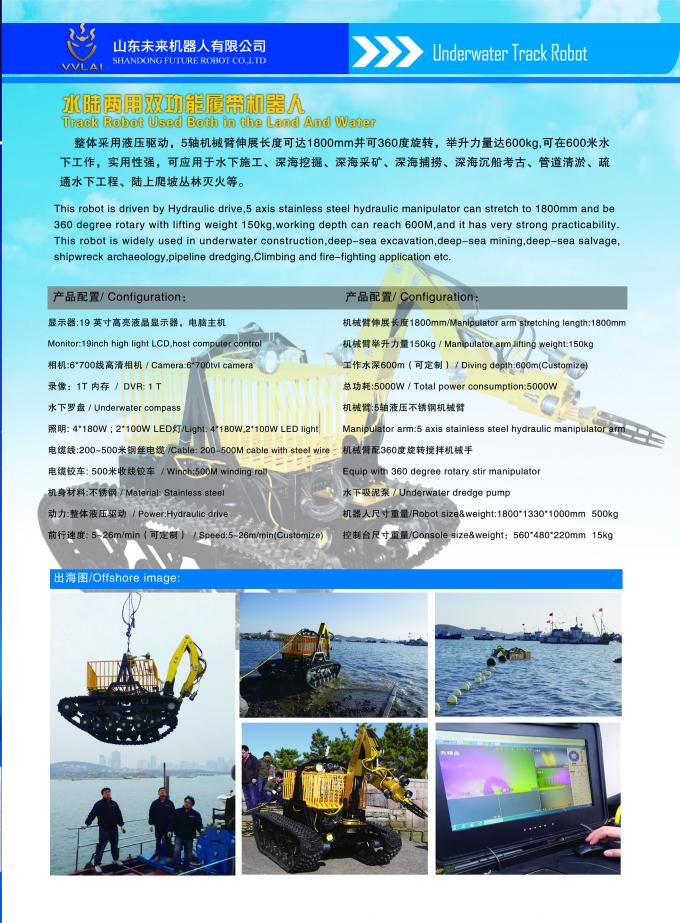
Big working Underwater Track Robot,working depth reaching 600M,has very strong practicability.This robot is widely used in underwater construction,deep-sea excavation,deep-sea mining,deepsea salvage,shipwreck archaeology,pipeline dredging,etc.
Standard Configuration:
Monitor:19inch high light LCD,host computer control
Camera:6*700tvl camera
DVR: 1 T
Underwater compass
Light: 4*180W,2*100W LED light
Cable: 200-500M cable with steel wire
Winch:500M winding roll
Material: Stainless steel
Power:Hydraulic drive
Speed:5~26m/min(Customize)
Manipulator arm stretching length:1800mm
Manipulator arm lifting weight:150kg
Diving depth:600m(Customize)
Total power consumption:5000W
Manipulator arm:5 axis stainless steel hydraulic manipulator arm
Equip with 360 degree rotary stir manipulator
Underwater dredge pump
Robot size&weight: 1800*1330*1000mm 500kg
Console size&weight:560*480*220mm 15kg
Site picture:
Underwater Collecting area




Firefighting area
Dredging area

This Walking ROV with track can also be upgraded according to the customers' special requirements!
Welcome to contact us for more information!
Our picture album:








Company Introduction:
Our factory is located in Weihai City,which is near to the seaside,has very convenient transportation access,the size is over 6000 square meter,the fist floor is the workshop to manufacture the ROV products and the second floor has the office,meeting room and dining room.

Factory gate:

Workshop1:

Workshop2

Office:

General Manager's office

Sales manager's office:

Reception Room:

Meeting Room:

Contact:
Shandong Future Robot Co.,Ltd
Add:No.10-3,Futian Road,High-tech Development Zone,Weihai City,Shandong Province,China
Tel: 86-631-5326187
Fax: 86-631-5326187
Skype: liyanghong512
Email: robot1@vvlai.com
Website: http://www.vvlai.cn http://www.vvlairov.com