Underwater Electric Cutting ROV(VVL-XFQG-30A)
1. Product Image

2. Product Advantage
* Intergration Cutting Manipulator arm with 360 degree rotation in horizon while 220 degree rotation in vertical
* Cutting diameter range from 30-100mm, can specially make 150mm cutting diameter, can achieve bigger task with small body
* Can achieve cutting task 100-300m under water
* Intergration Cutting Manipulator, can hold tightly, cut stably, can cut Steel Rope, Fishing Net, Steel Pipe and Rope twisted on the Propeller very well (compare with 2 manipulator, one for holding, the other for cutting, our design will avoid disc stuck while the 2 arms uncoordinated well)
* 4 thrusters push the robot to 4 direction stably
* Magnetic coupling motor, speed controllable
* Easy operation, stable function
3. Application Area
* Underwater survey and inspection in ocean and river
* Vessel inspection
* Small size is used for cutting steel rope, fishing net and rope twisted on the propeller
* Big size is used for cutting steel pipe, steel rope and other metal objects with bigger diameter
* Mainly for Underwater Rescuers, Large Vessel, Underwater Engineering etc
4. Technical Data and Main Components
| Diving Depth |
100-300m |
| Speed |
0-2m/s |
| Body Dimension |
980mmx600mmx700mm, weight approx 60kg (for machine with 30mm cutting dia) |
| Body Material |
Stainless Steel |
| Camera |
4*700 line CCD camera (1080P HD Camera optional) |
| Illumination |
4*LED lights, follow each camera, 2*75W halogen lamp |
| Thruster |
2*400W thruster, control robot to move forward, backward, right and left |
| 2*400W thruster, control robot to move forward, backward, upward and downward |
| Compasses |
Outwater Compass and Underwater Compass |
| Cable |
| Cable Core |
Armoured umbilical cable, (fiber-optic optional) |
| Length |
100-300m |
| Float |
0 in freshwater |
| Breaking Strength |
100kg |
| Cable Roll |
Cable roll, special used for underwater;
Or manual spooling instrument |
| Outer water control moudle (SCU) |
| Software |
VVLAI software |
| Input Voltage |
220VAC |
| Dimension |
520mm X240mm X 450mm |
| Display |
19 inch LCD high-lighted display, electronic interface, 4 images display from different directions, 500g DVR |
| Console |
Impact-resistance and Water-proof console |
5. Main Components
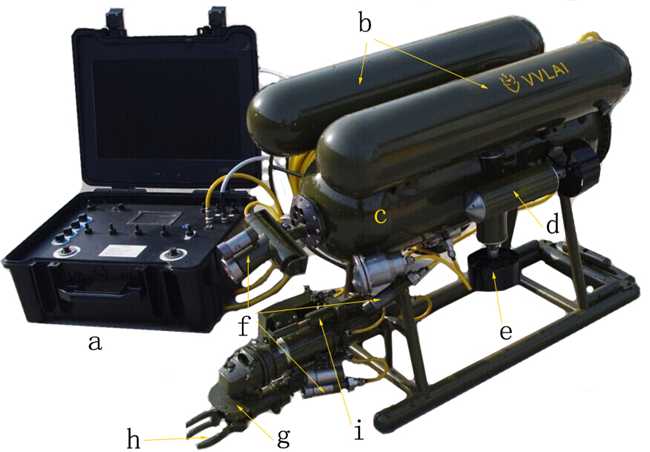
| a. Console, to control robot to move, camera and cut underwater |
| b. Float Tube |
| c. Main body |
| d. Thrusters for left and right |
| e. Thrusters for upward and downward |
| f. Camera with light, each camera with a light attached |
| g. Cutting Blade (disc), replaceable for various cutting thickness, cutting shape and cutting tasks |
| h. Manipulator Arm, for holding the object being cutted |
| i. Blade (disc) Pusher, total Route Distance 60mm |
6. The Button of Console
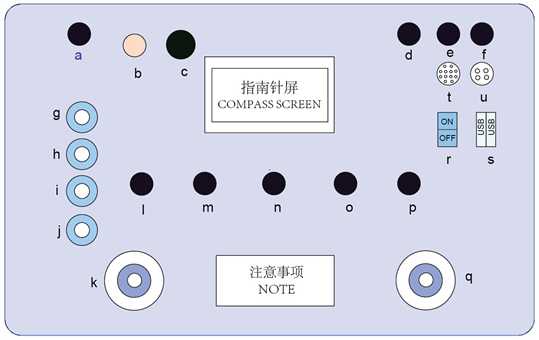
| a. Electronic Power |
|
| b. 12V Indicating Light, automatically light after power on |
|
| c. Fuse |
|
| d. Cutting Machine on or off |
|
| e. Turn on or off the Big Light ahead |
|
| f. Back-up button, no function |
|
| Thruster Knob |
|
| g. Left Thruster Knob, the speed increase from left to right |
|
| h. right Thruster Knob, the speed increase from left to right |
|
| I. Master Knob for all thruster, the speed increase from left to right |
|
| j. Middle Thruster Knob, the speed increase from left to right, the machine floats up the soonest while switch to right |
| k. Direction Control, control robot to move forward, backward, left and right, the Control direction is the same as machine moving direction |
| l. Switch for 5W light in front of the camera |
|
| m. Control Manipulator Arm to grip or loose cutting object |
|
| n. Control Cutting Machine forward to backward, for cutting or withdrawing |
|
| o. Control Cutting blade (disc) to rotate in two direction, push button up, the blade rotate clockwise, push button down, the blade rotate anticlockwise |
| p.Float button, push button up, robot float upwards, push button down, the robot sink downwards |
|
| q. Camera rotation knob, to control camera rotate 200 degree in vertical and 360 degree in horizontal, the control direction is the same as camera moving direction |
| r. Air button (Cutout Switch), protect robot from current over loaded |
|
| s. USB connector, to connect mouse or USB instrument, can output data |
|
| t. Cable line connector, 12 needles, for connecting yellow cable line |
|
| u. Power line connector, 4 needles, for connecting white power line |
|
7. Position Setup System Introduction
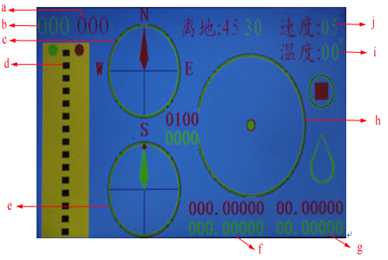
| a. Appointed Depth (meter) |
| b. Actual Depth (meter) |
| c. Compass underwater (the compass of ROV direction) |
| d. Setup Depth Coordinate Display |
| e. Compass outwater (the compass of console direction) |
| f. Longitude |
| g. Latitude |
| h. GPS Location |
| i. Temperature |
| j. Speed (1-5, 5 grade, 5 is the fastest, 2m/s) |
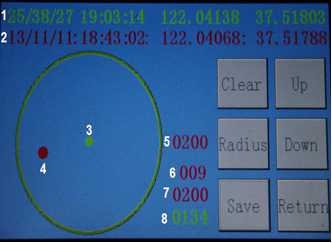
Underwater ROV GPS:Can display current GPS position, can keep record of 1000 location of GPS coordinate, have function of searching in the range of 0.5-100 kilometer diameter.
1. Longitude of current location
2. The longitude and latitude of record location
3. Current position (green point)
4. Searching position (red point)
5. Searching diameter
6. Record number
7. Display diameter
8. Actual distance
8. Usage Step
| 1. Open tool box, and take all components outside, including console, cable and robot, inspect each component as per below |
| 2. Connect cable line and power line |
|
| *Power Line is white line |
|
| *Cable Line is yellow line |
|
| 3. Open the power button on console, adjust each button, inspect the function of each components. Set up display screen as per below Set Up Step |
Please inspect below points after turning on console:
*Power inspection, make sure no short circuit before power on for inspection
*Open master switch, see if it's interference on display image
*Check whether it's interference on display when turn on/off light
*Check LED light
*Check Display Screen and Menu Item, check button flexibility
*Inspection camera function and effect, cancel the image after inspection
*Inspection video function and effect, cancel the video after inspection
*Check USB leadout of the console
*Check each components
*Check propeller work condition
*Check camera rotation condition |
| 4. Power off, put machine into water |
|
| 5. Turn on the power after putting robot into water, operate robot to work according to the instruction of Console Button |
| 9. Other Notice |
| All Art No, related to this robot with various cutting diameter |
| Art No. |
| VL-QG1-30A |
| VL-QG1-40A |
| VL-QG3-60B |
| VL-QG3-80B |
| VL-QG3-100B |
| VL-QG3-150B |
10.Company Introduction:
Established in 2005, Weihai Future Robot Co.Ltd is a manufacturer specializes in the design and production of underwater robot. We are located in Weihai with convenient transportation access.All of our products comply with international quality standards and are greatly appreciated in a variety of different markets throughout the world. After about 10 years’ development and exploration ,we have successfully produced underwater thruster robot,360 degree rotary robot, underwater video camera, suspended robot,underwater walking robot, pipe inspection robot, piepline working robot, underwater panoramic suspension manipulator arm, underwater electric cutting machines and other products, enjoying the reputation and compliment from all over the world.We always adhere to the business philosophy of“pursuit excellencewith Future”, the principle of “trustful quality, gratitude heart, creating Future’ brand”, the spirit of creativity and exploration”, The company has strong R & D strength, high-quality professionals and advanced management mode and we will confront all the challenge and test in the market. Our company promise:Business principle: honesty-based, credit-first, quality-oriented.Service philosophy: punctual delivery, reasonable price, honest attitude.In the new century, we will work hard and closely cooperated with customers to create bright future of Future Robot. Welcome new and old customers to contact us for more detail
11.Contact Info
Skype:liyanghong512
,Stainless Steel,Cutting Ropes,Aluminum Pipe, supplier")