| Power: |
30kW |
Robot Size: |
5350*2650*3500mm |
| ROV: |
Underwater Dredging ROV |
Weight: |
16500kg |
| Mainpulator Extended Length: |
7220mm |
Platform Size: |
12000x920x10500mm |
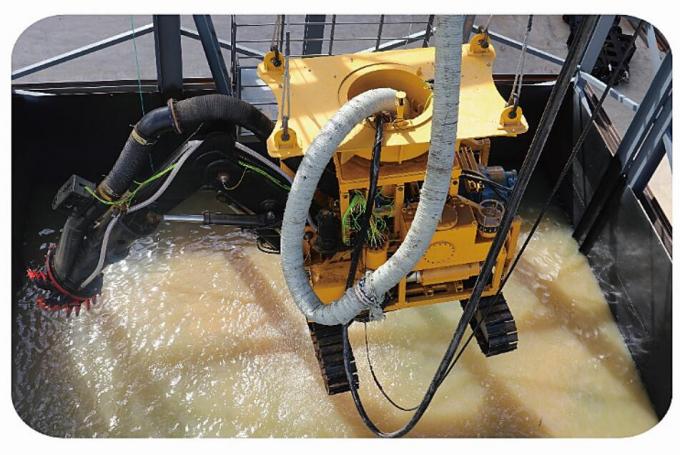
Crawler Cutter-suction ROV
VVL-TRA-DQ100A

>Product Introduction
The construction of large bridge across sea and deep water is an important basic project in the construction of intelligent port and ocean engineering in China. To meet the strategic needs of marine powers, break through the underwater excavation environment and situation in the construction of large deep-water caisson silt removal, such as "unclear" and "unsustainable" excavation of well shape and poor soil adaptability, blind spots, etc technical problems, using the advantages of silt removal technology of winch-suction robot, creatively design a set of "4-axis 5-action" gantry winch-suction robot, "3-axis 4-action"Integrated silt removal solution consisting of a crawler-type robot and a centralized lifting platform for auxiliary operations.The key technology of Visualization of Digital Mining, Strong Mixing and Strong Suction,and the development of visualized mud cutter suction pumping system for Digital Excavation have obvious efficiency and accuracy in the silt removal of deep-water pier caisson.
> Application scenarios
Deep well reaming suction construction of Changtai river crossing passage

> Application field
Dredging of pier excavation, dredging of marine engineering, dredging of large caisson, port engineering and other fields.
>VVL-TRA-DQ100A
ROV weight and size:5350*2650*3500mm(Mainpulator no extended size)
Mainpulator extended length 7220mm,16500kg.
Material Structure:All structural parts of the body, track, roller and driving wheel, corrosion-resistant, can be used in seawater and fresh water.
Power system::The power of the hydraulic system is 30kW, the displacement is 71ml / R, and the rated working pressure is 25MPa (two sets);
Inspection system:Eight groups of HD cameras, two groups of suction heads, two groups in front, one group in the top, one group in the left and one group in the back,
Lighting system:8 groups of 50W LED lamps;
Cable control system:The design tension more than 3000kg, the design speed of the cable is 0-5m / min, the length of the winding cable is 150m, and the diameter of the drum is 1050mm;
Crawler chassis:Working water depth, 150m, traveling speed: 0-6m / min, traveling moment, 48000n. M, climbing capacity 20 °;
Working ability:Flow: 350m '/ h, lift: 60m, working depth: 130m, blowdown diameter: 200mm, through-hole particles, 80mm, pump height: 65m (on water)
Hydraulic twist suction head: rotating speed: 0-40r / min, rotating torque: 5000NM, through particle diameter: 80mm, driving mode: hydraulic
Deck unit:Embedded host, 15 processor, 1t hard disk, 128GB SSD, 19 inch high shell LCD, multi screen control center, industrial level control handle
Platform size:12000x920x10500mm, heavy day: 58T, lifting heavy halo: 16t + 16t, lifting speed: 9m.
>Company introduction
Shandong Future Robot Co., Ltd. has its own R & D system. Its main products include intelligent marine engineering robots, underwater suspension robots, pipeline inspection robots, underwater crawler robots, deep-sea underwater robots, underwater cutting machines, fire fighting robots and other products. It has passed IS09001, IS014001, CE, FCC and other certification. The "VVLAI" brand has won the "Shandong Famous Brand" and its products are exported to the United States, China, Japan, Russia, Chile, Spain, Sweden and many other countries.We have set up distributors in many countries and regions at home and abroad, products has earned domestic and foreign customers’ trust and reputation The company has independently developed and successfully exported a set of seabed mining robots with a daily output of 500 tons, and won the gold medal of the second provincial governor's Cup industrial design competition. The company was selected by CCTV's "I love Invention" and "Approaching Science" columns, and made special films such as "Iron Claw Underwater Salvaging" and "Electric Saw Cutting in Water".
At present, the company has made excellent achievements in the "12th Five Year Plan" and "13th Five Year Plan" projects. It has successively undertaken the dredging project of the open and underground channels in the middle section of the South-to-North Water Diversion Project, the Yellow tunnel in the east section, the Yangtze River Channel in Changtai, the dredging construction of the open caisson of the Oujiang Beikou bridge, the multi-functional inspection and maintenance of the Three Gorges power station, the marine biological monitoring system of the nuclear power tunnel, the submarine cable laying inspection of the national grid, and the underwater inspection system of the army boats. The following projects are carried out: Oil spill accident rescue, Beijing University of technology data acquisition robot, Underwater detection and biological sampling equipment in Norwegian Sea area, Subsea exploration and mining in Baltic of Russia, Monitoring and capture of aquatic pasture, Emergency fire water rescue, etc.
>Contact